俹俬俠侾俀俥俇俈俆偺俫俤倃丂ServoCnt.hex丂(1KB)
| 俹俬俠僒乕儃僙儞僞乕 | ||
|
||
| 丂儕儞働乕僕傪偡傞帪偵僒乕儃傪拞棫忬懺偵偟偰儕儞働乕僕偡傞偺偼婎杮偱偡偑丄偙傟偑側偐側偐柺搢偱丄憲怣婡偲庴怣婍偵僶僢僥儕傪梡堄偟偰偲埲奜偵戝妡偐傝偱偡丅偦偙偱丄俹俬俠偱僒乕儃偺拞棫埵抲偺怣崋傪弌偟偰傗傟偽丄懠偵梡堄偡傞傕偺偼僶僢僥儕偩偗偱嵪傒傑偡丅 | ||
| 丂晹昳偺揰悢傪彮側偔偟偰丄彫偝偔偡傞偙偲偵傕挧愴偟傑偟偨丅 | ||
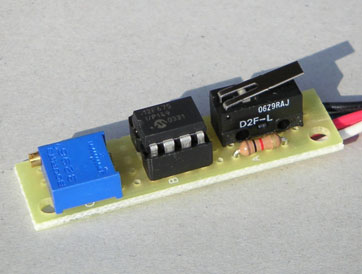
| 丂偟偐偟丄偨偩彫偝偄偩偗偱側偔丄斈梡惈傕峫偊偰丄儃儕乕儉偱僒乕儃儂乕儞傪嵍塃偵摦偐偣傞傛偆偵偡傟偽丄拞棫埵抲偺挷惍偼傕偪傠傫丄懬妏偺挷惍摍偵傕巊偊傞傛偆偵僾儘僌儔儉偟傑偟偨丅 | ||
|
||
|
|
||
| 晹昳昞 | ||
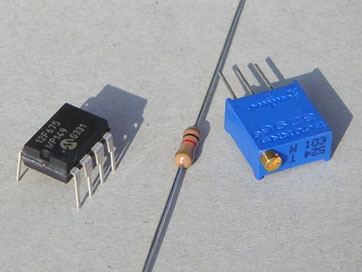
| 俹俬俠丂丗 | 俹俬俠侾俀俥俇俈俆 | 侾杮 |
| 壜曄掞峈丂丗 | 侾侽俲兌 | 侾杮 |
| 掞峈丂丗 | 侾俲兌丂侾乛俇倂 | 侾杮 |
| 僐乕僪懠丂丗 | 侾幃 | |
|
|
||
| 夞楬恾 | ||
|
||
|
|
||
| 俹俬俠侾俀俥俇俈俆偺僜乕僗丂ServoCnt.asm丂(9KB) 俹俬俠侾俀俥俇俈俆偺俫俤倃丂ServoCnt.hex丂(1KB) |
||
| 丂偙偙偱偼丄俹俬俠偵偮偄偰偺愢柧偼丄愱栧帍傗俹俬俠娭楢僒僀僩偵偍傑偐偣偟偰丄峊偊偝偣偰偄偨偩偒傑偡偑丄俹俬俠偵彂偒崬傓僾儘僌儔儉傪岺晇偡傞偲丄偄傠偄傠側僶儕僄乕僔儑儞傕妝偟傔傑偡丅 | ||
|
|
||
| 丂仸俹俬俠偼丄俆丏俆倁埲忋偺揹埑傪壛偊傞偲夡傟傑偡丅摿偵丄枮廩揹偟偨揹抮偼係杮偱俆丏俇倁埲忋偵側傞応崌傕偁傝傑偡偺偱丄偛巊梡偵偛拲堄偔偩偝偄丅 | ||
|
|
||
|
||
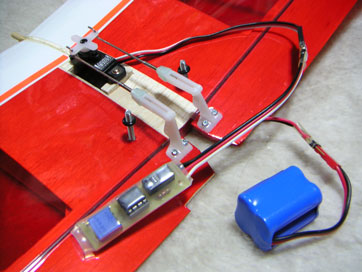
| 丂幨恀偼丄揹尮懁偵儅僀僋儘僗僀僢僠傪偮偗偰丄僗僀僢僠傪墴偟偰偄傞娫偵怣崋傪弌偡傛偆偵偟傑偟偨丅偪傚偭偲偟偨徣僄僱偱娐嫬偵攝椂偟傑偟偨丅 | ||
|
|
||
| 栠傞 | ||