


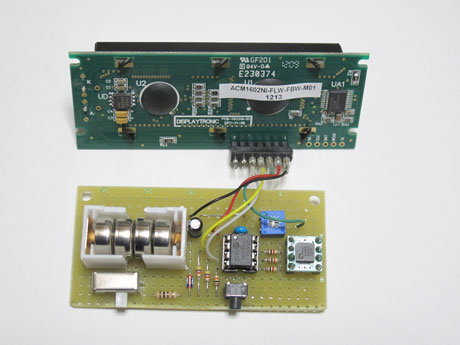
PICと3軸加速度センサを組み合わせて、下記の機能を組み込んでインシデンスメーターを製作しました。
1.3軸の角度が測定できること
2.ゼロリセットが出来て角度が読みやすい様にすること
3.主翼・尾翼の取り付け角の測定ができること
4.舵角の測定ができること
5.上反角も測定ができること
6.電源にボタン電池を使用してコンパクト軽量にすること
使用説明
・3軸の角度が測定できます。しかし、使用した3軸加速度センサは、+-5%の感度誤差がありますので、測定値は、あくまで目安としてください。 なお、X・Y・Z軸はあくまで3軸加速度センサに対してで、液晶画面に対してではありませんので、勘違いしないようにしてください。
・なお、分解能が低いために、0度から+-37度付近までは、0.3度間隔ですが、角度の絶対値が大きくなるにつれて間隔が大きくなります。
・ゼロリセットは、ボタンを押して、離して0.6秒後に、ゼロリセットされます。ゼロリセットされる範囲は、0度から+-37度付近までですが、できるだけ小さい角度でゼロリセットを使用された方が、計測誤差を少なくすることができます。
・3軸で使用される場合は、Ⅹ軸・Y軸でゼロリセットし、三角定規等で90度傾けてZ軸をゼロリセットしてお使いください。
・著者は、Z軸の活用が見当たらないのですが、工夫すると、ほかにもいろいろと使い道があるかと思います。正確な角度は測れませんが、利用価値は充分あると思います。どうぞご活用ください。
HEX angle_view.hex
ソースとHEXを圧縮 angle_view.zip








製作補足
この「インシデンスメーター」のソフト開発は、Microchip社のフリーソフト MPLAB ver8.66、 HI-TECH社のフリーソフト PICC-Lite ver9.83を使用しました。IDEのver8からライブラリに変更があり対応しましたが、C言語に不慣れな筆者が製作したものです。不具合等もあるかもしれませんので、ご使用ご利用に際しては自己責任にてお願い致します。なお、C言語やPIC等の詳しい説明は、専門書や関連サイトにおまかせして控えさせていただきます。
(13.03.29)